都市型自動運転船「海床(うみどこ)ロボット」による都市の水辺のイノベーションに関する実証実験を実施~水中・水面の環境データを活用した安全な自動運航を検証~
2025年6月30日
株式会社竹中工務店
竹中工務店(社長:佐々木正人)を代表法人とする海床ロボットコンソーシアム(※1)は、都市の水辺空間の有効活用と新たな交通手段の提供を目的として開発を進めている、都市型自動運転船「海床(うみどこ)ロボット」の実証実験を6月18日(水)~20日(金)に大阪城公園の東外堀で実施しました。2021年度から継続して行われている実証実験(※2)の4回目となる今回は、海床ロボットのより安全な自動運航の実現に向けて、水中・水面の環境データの航行制御への活用可能性の検証を行いました。その結果、水中・水面の環境データが安全な航行制御に活用できるかなどを確認しました。
- (※1)海床ロボットコンソーシアム
株式会社竹中工務店、国立大学法人東京海洋大学海洋工学部清水研究室、株式会社IHI、炎重工株式会社、株式会社水辺総研、新木場海床プロジェクト、一般社団法人ウォーター・スマート・レジリエンス研究協会、あいおいニッセイ同和損害保険株式会社、ココホレジャパン株式会社(2025年6月から参画)から成る共同プロジェクト。 - (※2)「海床ロボット」は、公益社団法人2025年日本国際博覧会協(博覧会協会)と大阪商工会議所の主催する、「2025年大阪・関西万博の会場予定地である夢洲における実証実験の提案公募」に2021年5月に採択されています。
実証実験の内容
「海床ロボット」は、海床ロボットコンソーシアムが開発した純国産制御システムを搭載し、海や運河・河川、湖沼などの水面に浮かべた床(3m四方)が自動で航行し、離着岸を行う自動運転船です。4回目となる今回の実証実験では、航行制御に必要な水域情報の可視化をテーマとして以下の3つの実験を行ないました。
実験1:超小型水上ドローンによる水域監視
超小型水上ドローン(海床ロボットMINI、MICRO)を使用し、水中および水面の障害物の有無や水質を撮影。リアルタイムで取得した情報を航行制御に活用できるかを検証しました。
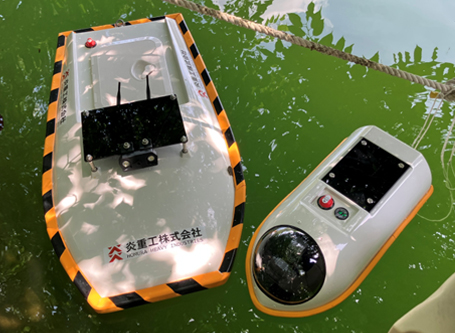
海床ロボットMINI(左)MICRO(右)

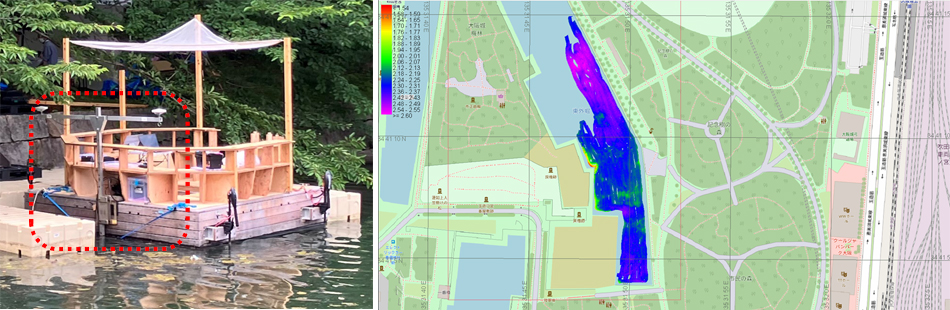
実験2:マルチビームソナーによる水深マッピング
株式会社東陽テクニカの協力のもと、海床ロボットにマルチビームソナーを取り付け、水底をスキャンして水深マップを作成。水深情報を踏まえた航路設定の有効性を検証しました。
実験3:LiDARセンサによる位置情報補完
株式会社ハイパーデジタルツインの協力のもと、陸側にLiDARセンサを設置し、海床ロボットの正確な位置情報を補足。この情報を航行制御に活用するための検証を行ないました。

これらの水域情報可視化技術を航行制御に活用することで、より高精度な自動運転の実現を目指します。
今後の予定
開催中の大阪・関西万博では、テーマウィーク事業とロボットエクスペリエンス事業に採択されています。10月2日(木)から12日(日)まで会場内「つながりの海」で海床ロボットによる水上景観演出デモを実施するほか、10月8日(水)テーマウィークスタジオで国際シンポジウムを主催、都市型自動運転船を開発するオランダのROBOAT、スウェーデンZEAMとともに都市の水辺のイノベーションをテーマにディスカッションします。また、9月29日(月)から10月13日(月)までロボット&モビリティステーションで説明展示を行います。本実証を通じて、会場外でも未来社会の技術を見ることのできる場を提供し、万博との連携を図ります。
本実証実験に関してご協力戴いた企業・団体
- ・センティード 株式会社(上屋製作協力)
- ・ヨッティングワールド 株式会社(浮桟橋提供)
- ・株式会社 岡村造船所(船体製作)
- ・特定非営利活動法人 大阪水上安全協会(運航管理)
- ・株式会社 東陽テクニカ(実験協力)
- ・株式会社 ハイパーデジタルツイン(実験協力)
参考リンク
プロジェクト背景
日本の都市は水辺(川辺・海辺)を中心に形成されてきましたが、東京・大阪等の大都市も例外ではありません。近年、大都市臨海部は、都市過密化により、交通、物流、環境、防災等の課題が複雑に絡み合っています。こうした課題に対して、人・物の移動を支えるうえで、都市部の低未利用化した水域の活用が重要な糸口になります。
海床ロボットコンソーシアムでは本プロジェクトを通じて、これらの社会課題の解決に向け、都市型自動運転船「海床ロボット」が都市内水域を動き、水辺のさまざまな都市課題を解決し、水辺を変革していく未来を目指しています。
関連リリース
都市型自動運転船「海床(うみどこ)ロボット」による都市の水辺のイノベーションに関する実証実験を実施 ~安全管理・舟運事業の立場から実証・検証~(2023.12.14)
水辺の都市課題解決に向けて都市型自動運転船「海床(うみどこ)ロボット」の実証実験を実施 ~2台のロボットの自動航行、桟橋着桟時における非接触充電の可能性を検証~(2022.12.14)
水辺の都市課題解決に向けて都市型自動運転船「海床(うみどこ)ロボット」の実証実験を実施(2021.12.17)
2025年大阪・関西万博開催予定地 夢洲での実証実験公募に、【都市型自動運転船「海床ロボット」による都市の水辺のイノベーション実証実験】が採択(2021.05.31)